Dieses Dokument wurde mit Sorgfalt erstellt. Dennoch können Fehler nicht ausgeschlossen werden. Eine Benutzung und/oder Verwertung dieses Dokuments erfolgt daher auf Eigene Gefahr!
4.0 Vorbemerkungen zu Steuerungen
Die verschiedenen Steuerungen entstanden entweder historisch (Amplitudenmodulation), aus Zweckmäßigkeit (Impulssteuerungen) oder aus Neugier (Phasenanschnittsteuerungen). Die Vielzahl macht eine Auswahl notwendig, zumal um nicht wenige Steuerungen sich ein Phantasiegebilde über deren tatsächlichen Leistungsmöglichkeiten gebildet hat. Im Folgenden sollen nur die wichtigsten zur Sprache kommen.
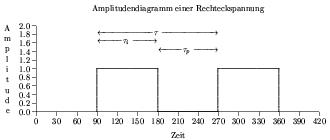
Amplitudenmodulationen sind die verbreitetsten Steuerungen für Modelleisenbahnen, die (nicht ganz korrekt) auch als "analoge Steuerungen" bezeichnet werden. Diese Form der Drehzahlsteuerung wird auch Leonard-Steuerung genannt. In Form einer einstellbaren Spannung am Transformator oder Fahrgerät wird die Drehzahl (und damit die Geschwindigkeit) des Modells eingestellt. Elektronische Schaltungen sind meistens nicht notwendig. Je nach Erfahrung und Geschicklichkeit des Benutzers kommen recht unterschiedliche, zumeist der entsprechenden Aufgabe zugeschnittenen Resultate heraus. Da die Motoren sehr verschiedene Charakteristika aufweisen, aber nicht jeder Benutzer bereit ist, sich die notwendige Erfahrung zuzulegen, wird die AM zunehmend zurückgedrängt zugunsten der Impulssteuerungen. Dennoch ist die AM mit Abstand die effizienteste und schonenste Ansteuerung für Motoren.
Weit weniger verbreitet als AM sind Frequenzmodulationen, in denen die Frequenz zum Einstellen der Drehzahl benutzt wird. Da diese Steuerung nur mit Wechselstrommotoren durchführbar ist, gelten die folgenden Überlegungen nicht für DC-Motoren. Dies ist deshalb möglich, da die Motoren aus Spulen aufgebaut sind, welche einen mit der Frequenz steigenden Blindwiderstand haben. Folglich nimmt die Drehzahl mit zunehmender Frequenz ab (Ausnahme Synchronmotoren, deren Drehzahl proportional der Frequenz ist). Allerdings nimmt auch die mögliche Leistung des Motors mit zunehmender Frequenz ab, sodaß bei niedrigen Drehzahlen keine großen Lasten bewegt werden können. Über das Ausmaß des Frequenzeinflusses auf die Drehzahl entscheidet die Induktivität der Spulen (ein Spulenkennwert): je kleiner die Anschlußinduktivität, desto größer die Frequenz mit der der Motor noch betrieben werden kann. Bsp.: ein kleiner Märklinmotor mit insgesamt 6,4 mH Induktivität kann im Leerlauf mit ca. 1000 Hz betrieben werden. Hier darf allerdings nicht verschwiegen werden, daß die Stromaufnahme die maximale Betriebsfrequenz erheblich beeinflußt!.
4.3.0 Vorbemerkung zu Impulssteuerungen
Im Zuge der zunehmenden Verwendung von Rechnern (Computer) zu Steuerungszwecken fanden bzw. finden Impulssteuerungen steigende
Verbreitung. Aus diesem Grunde werden Impulssteuerungen allzugerne (und leider auch falsch) als "digitale Steuerungen"
bezeichnet. Diese Bezeichnung ist deswegen falsch, da digitale Informationsverarbeitung und Motoransteuerung nichts miteinander zu tun
haben und unabhängig voneinander realisiert werden können.
Charakteristisch für Impulssteuerungen sind Impuls und Impulspausen. Mit Ausnahme der PAM ist die Betriebsspannung konstant,
ein Vorzeichenwechsel der Spannung kommt nicht vor. Daher sind Impulssteuerungen eine Kombination aus Strom- und Frequenzsteuerung.
Im Gegensatz zu AM/FM sind einige Kennwerte von Bedeutung, welche in folgender Abbildung erklärt werden sollen:
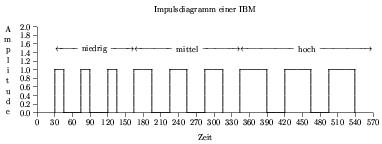
4.3.1 Impulsbreitenmodulation (PWM, IBM)
Den Unterschied sieht man am besten in den Impulsdiagrammen:
 |
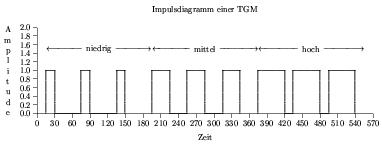 |
4.3.2 Impulspausenmodulation (Stromsteuerung, IPM, PPM)
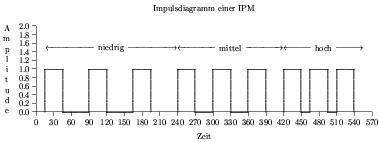
Entsprechend der IBM kann auch die IPM aufgebaut werden, mit dem Unterschied, daß nun der Rückwärtszähler nicht
die Impulsdauer, sondern die Pauendauer einstellt (die Einflußgrößen Impuls- und Pausenzeit werden gerade vertauscht).
Folglich entspricht der Tastgrad 1/16 der IBM einem Tastgrad 15/16 in der IPM (am Zählerausgang). Dies muß dann noch von der
Ansteuerungselektronik des Motors entsprechend umgesetzt werden. Dazu eignet sich u.a auch ein Inverter. Alternativ kann der Motor direkt angesteuert werden, dann muß allerdings die Zählweise verändert werden.
Der Aufwand ist recht gering, und Regelungen lassen sich mit IPM leichter aufbauen als bei IBM (die 6090/6090x-Dekoder
von Märklin basieren auf IPM im Analogbetrieb bzw. einer modifizierten IPM im Digitalbetrieb).
4.3.3 gepulste Amplitudenmodulation (IAM, PAM)
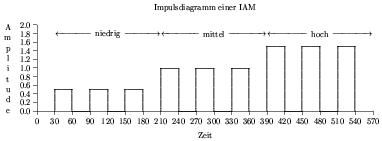
Die PAM kann als Kombination einer (fast beliebigen) Impulssteuerung mit einer Amplitudenmodulation angesehen werden.
Durch den konstanten Tastgrad erhöht sich der Momentstrom im Vergleich zur AM. Somit ist die Ansteuerung der Motoren identisch.
Aufgrund der Stromüberhöhung während der Impulse werden die Kommutatoren und Bürsten überproportional
abgenutzt, doch ist dies ein generelles Problem der Impulssteuerungen.
Schaltungstechnisch ist eine Impulsamplitudenmodulation leicht aus der Impulspausenmodulation ableitbar, indem
der Zählerausgang mit einem Kondensator geglättet (intergriert) und über einen Schalter mit einstellbarem
Tastgrad auf die Endstufen geleitet wird. Regelungen sind etwas einfacher als bei AM einzurichten.
4.3.4 gepulste Frequenzmodulation (IFM, PFM)
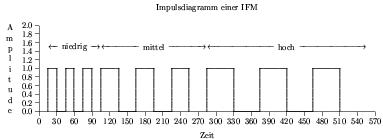
Pulsfrequenzänderung bei konstanter Amplitude und konstantem Tastgrad.
4.3.5 Impulspaketsteuerung (IPS)
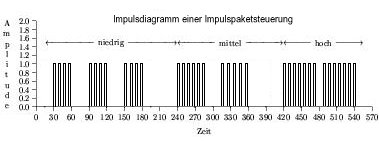
Diese Art der Motorenansteuerung wurde in Märklinmodellen erstmals in Modellen der Baureihe 18.1 (3411) angewandt. Durch die Kombination zweier Impulssteuerungen kann die Ansteuerung an die individuellen Eigenschaften der Motoren sowie an die Erfordernisse angepaßt werden. Aus diesem Grund ist eine Vielzahl von Motoren mit dieser Art der Steuerung kombinierbar. In gewissem Sinne ist hiermit der Grundstein für viele einstellbare Variablen ("CV's") gelegt worden, da nun die meisten auf einfache Weise mit binären Steuerungen zugänglich sind. Ein weiterer Vorteil istdie breite Anwendbarkeit mit verschiedenen Stromsystemen, da die vorgegebene Amplitude den fest eingestellten Tastgrad nicht beeinflußt. Lediglich in Verbindung mit Impulssteuerungen muß auf einen ausreichenden Frequenzabstand zwischen der hochfrequenten Taktung und der überlagerten Frequenz der Impulssteuerung geachtet werden (das Modell 3411 ist mit 6,64 kHz PWM auf den Schienen nicht sinnvoll einsetzbar).
Folgende Tabelle vergleicht die gemessenen Durchschnittswerte in Abhängigkeit von der benutzten Steuerung. Hierbei wird zwischen den
verschiedenen Impulssteuerungen nicht unterschieden. Auf die Angabe von Streuungen wird hier verzichtet.
| Betriebssystem | Anzahl der Leistungsmessungen | P2 in mW | h in % | Drehzahl in Hz | Nettostrom in mA |
Anzahl der Drehzahlmessungen | nmin in Hz | Umin in V | Übertemperatur am Ständer in °C |
|---|---|---|---|---|---|---|---|---|---|
| AC | 153 | 216 | 4.39 | 175.1 | 338.8 | 60.13 | 9.1 | ||
| HVW | 106 | 233 | 4.76 | 183.85 | 316.3 | 48.86 | 7.7 | ||
| DC | 123 | 248 | 5.04 | 179.39 | 325 | 58.9 | 7.85 | ||
| PWM | 110 | 230 | 4.52 | 179.82 | 307.5 | ||||
| Digitalmessungen nur mit entsprechend ausgestatteten Modellen, daher nur bedingt vergleichbar | |||||||||
| MMS | |||||||||
| DCC | |||||||||
Wie dieser kleinen Übersicht zu entnehmen ist, ist im Rahmen der Fehlergrenzen von <10% zwischen den getesteten Systemen kein Unterschied festzustellen. Daher kann auf weitergehende Tests für alle Ansteuerungen verzichtet werden.